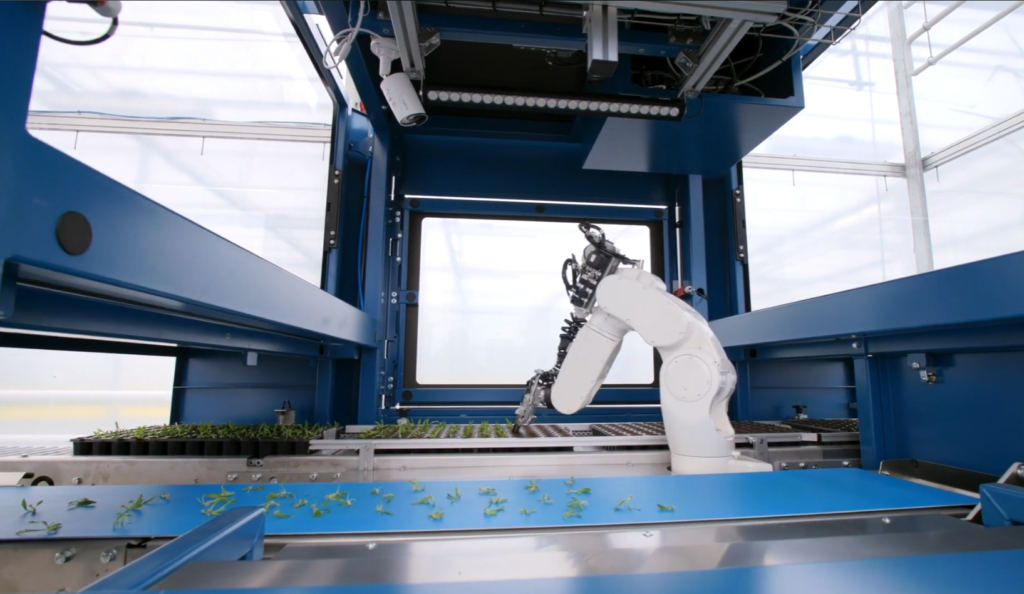
In dit project wordt een geavanceerde robotische stekverwerkingslijn ontwikkeld en getest. De installatie bestaat uit verschillende modules zoals een vision-systeem, grijpertechniek, snij-unit en transportbanen (zie schema op pagina 4). De robot herkent plantmateriaal via camera’s, positioneert het nauwkeurig en voert vervolgens handelingen uit zoals snijden, oppakken, sorteren en uitzetten in trays. Het doel is een constante productkwaliteit en een hoge verwerkingssnelheid, waarbij routinematig handwerk grotendeels wordt geautomatiseerd.
Tijdens het project wordt de robotlijn opgebouwd, uitgebreid getest en geoptimaliseerd. Er wordt onder andere gekeken naar de nauwkeurigheid van het vision-systeem, de betrouwbaarheid van de grijpers, het correct afstellen van plantparameters en de capaciteit in stekken per uur. Ook wordt de robot belast met realistische praktijkscenario’s, zodat duidelijk wordt hoe stabiel het systeem draait in een teeltomgeving. Denk hierbij aan variatie in plantmateriaal, bladstand, vochtigheid en lichtomstandigheden. De machine wordt zo verfijnd dat hij onder wisselende omstandigheden toch consistent presteert.
Na de testfase fungeert de robotlijn als demonstratie- en pilotopstelling voor andere kwekers. Bezoekers kunnen in de praktijk zien hoe de robot repetitieve handelingen overneemt, hoe uniform de stekken worden verwerkt en hoeveel arbeid dit bespaart. Daarnaast worden trainingen en rondleidingen georganiseerd om telers bekend te maken met robotisering in de opkweek. Zo laat het project zien hoe geautomatiseerde stekproductie niet alleen de arbeidsdruk verlaagt, maar ook nieuwe mogelijkheden biedt voor schaalvergroting, kwaliteitsborging en toekomstbestendige teelt.
Looptijd project: mei-dec 2025